
What Makes Our FPV Rally Different
Most FPV RC car footage misses the cockpit feel because the view is wrong. The lens is often too narrow or too distorted. The camera sits too high or too far forward. The dashboard is missing or low detail. Telemetry is usually missing or presented as a standard OSD overlay, which is effective, but does not feel like sitting inside a car.
Our approach is simple. Get the view right, then make the cockpit real.
This build is a complete one eighth scale 2001 Impreza rally cockpit centered around a high resolution resin dashboard, a correct driver perspective, and dual in dash displays. That combination creates a view that feels grounded, realistic, and consistent.
The Build
HPI WR8 Nitro 2001 Impreza
This FPV rally platform is built on the HPI WR8 Nitro 2001 Impreza, a chassis known for its durability and long standing reputation in high performance RC. The WR8 platform is designed to handle sustained speed, vibration, dust, and extended run times, making it well suited for demanding FPV rally use.
For FPV rally, reliability matters as much as speed. The WR8 Nitro provides a stable foundation that can survive real trail driving while maintaining consistent handling and predictable behavior. This allows the cockpit view and FPV link to remain usable and believable, rather than turning the footage into an action camera perspective.
The interior and mounting system are engineered specifically for this environment. Components are reinforced to manage vibration and impacts, ensuring that the dash view stays stable and the immersive experience holds up.

Why Nitro Instead of Electric
Choosing nitro was intentional. For this build, the goal was to go as scale and as realistic as possible. While electric platforms are extremely capable, they did not align with the experience we were trying to create.
There are very few true one eighth scale gasoline options, so the WR8 Nitro chassis became the right foundation. One eighth scale is a sweet spot for FPV rally. It is large enough to support a detailed cockpit, proper camera placement, and in dash displays, while still being compact enough to carry, transport, and run casually without turning into a full size project.
Nitro brings an element of realism that electric simply cannot replicate. The sound of the engine. The smell of fuel. The visible exhaust smoke. The vibration and mechanical presence. All of it contributes to an experience that feels alive. When combined with a true cockpit view and immersive telemetry, the result feels closer to real rally driving.
Vehicle and Interior
HPI WR8 Nitro 2001 Impreza, powered by a 3.0 cc nitro engine producing 2.1 horsepower. In its current FPV rally configuration, the car runs an average top speed of around 37 miles per hour, with gearing options available to reach higher speeds.
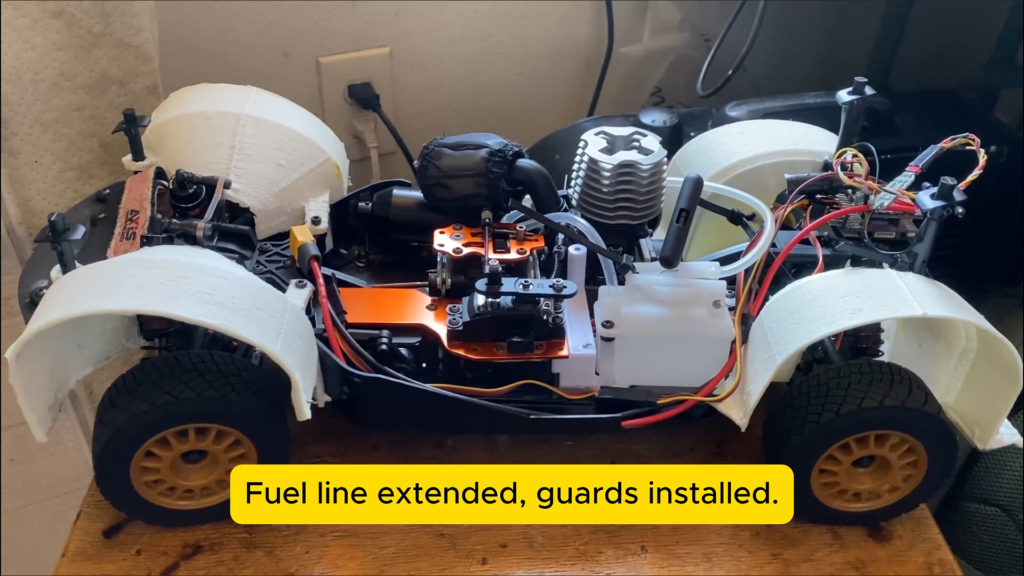
The body has been fully modified for a true cockpit view. The windshield and front side windows are completely cut out to allow an unobstructed driver perspective. The fuel tank has been relocated to create space for the dashboard and interior structure while maintaining reliable fuel delivery.
Removing window sections leaves the door frame areas between the windshield and front windows thin and structurally fragile. To restore strength, those areas are reinforced using thirty gram woven fiberglass cloth and epoxy. Additional reinforcement is applied around the body mounting holes and the wheel well arches to prevent cracking and tearing during high speed trail driving.
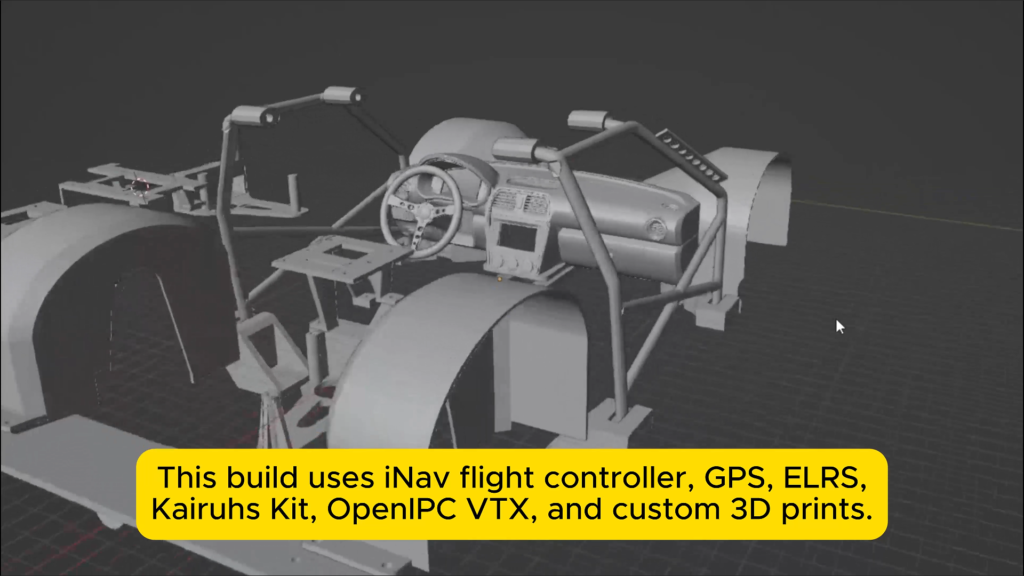
The interior features a high resolution dashboard, steering wheel, gimbal mount, roll cage, and fuel tank modification printed in tough resin for strength and vibration resistance. Additional components are printed in PLA and TPU, including wheel well guards, roll cage body mounts, and the dashboard mount pieces. An Outerwears 2 inch pre filter is installed to protect the engine during dusty driving.
While the reinforcement work prioritizes strength over cosmetic perfection, durability is the priority. These reinforcements allow the body to survive repeated high speed runs and aggressive terrain without destroying the shell.

FPV System
The FPV system is based on an OpenIPC Thinker running at 1080p and 70 frames per second with a 20 Mbps bitrate. Video capture is handled by a Sony IMX335 camera paired with a Foxeer 1.8 millimeter lens. Dual Foxeer antennas are used for reliable signal transmission.
The main OpenIPC Thinker board is powered directly from the flight controller. The WiFi card is powered separately using a dedicated five volt, three amp battery eliminator circuit to ensure stable operation and consistent video performance.
Control and Navigation
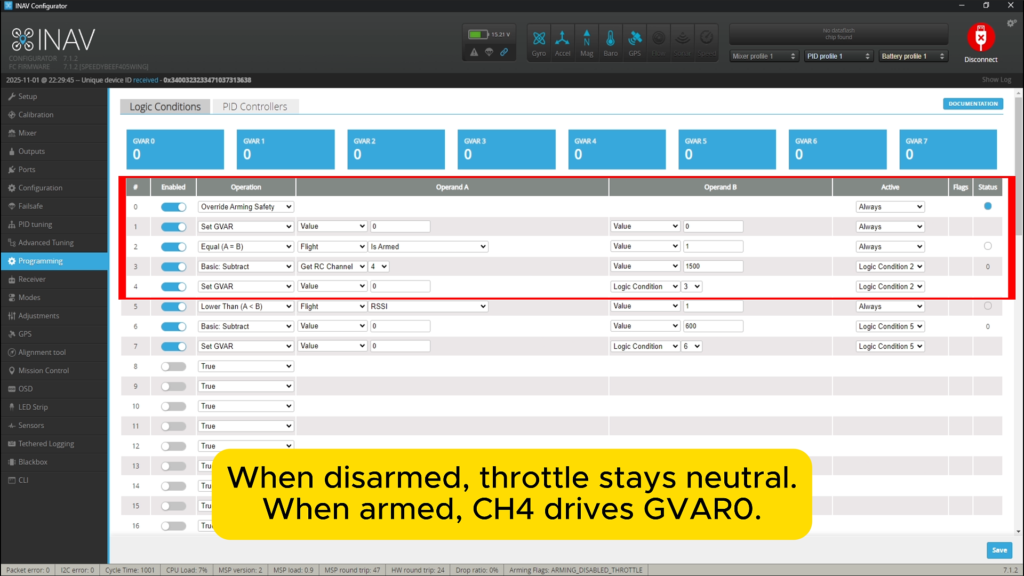
The system is built around a SpeedyBee F405 flight controller running INAV Rover 7.1.2, configured specifically for nitro vehicle operation. INAV Rover logic and conditions are tuned for nitro throttle, brake control, and failsafe behavior, allowing safe engine management and predictable response during signal loss or system faults. The entire electronic system can be powered by a 2 to 6 cell battery. For this build, we use 3 cell lithium ion flat packs mounted at the front due to their compact form factor, stable voltage delivery, and ease of packaging within the chassis.
Control input is handled through a Taranis QX7 stick transmitter equipped with a RadioMaster ELRS bay module, paired with a RadioMaster ELRS RP3 receiver on the vehicle. ExpressLRS supports up to sixteen control channels, allowing nearly any function to be mapped and controlled. The transmitter provides extensive flexibility through two position and three position switches, rotary knobs, and trim switches. This makes it possible to manage driving functions, camera pan, modes, display interactions, and auxiliary systems while maintaining low latency, superior range, reliable link performance, and full telemetry feedback to flight controller and transmitter.
A separate battery eliminator circuit is used to power the servos, as the flight controller cannot supply sufficient current for high load steering and throttle operation. A dedicated five volt, eight amp BEC provides stable power to the servo system, ensuring consistent steering response and reliable operation under load.
Position and speed data are provided by a Foxeer M10 250 GPS, enabling accurate GPS based speed measurement. Camera pan control is handled by a GDW RS 0708 350 degree digital metal gear servo, allowing smooth and precise camera movement that matches the driving perspective. The pan axis can be controlled either through transmitter inputs or via goggle head tracking, allowing the camera view to follow natural head movement.
A three axis C20T gimbal was originally tested for this build. While it performed well mechanically, the amount of movement was not suited to the FPV rally driving experience we were aiming for. Even when the vehicle was not rolling, there was noticeable gimbal jitter, and during acceleration and braking there was excessive pitch sway.
Because the cockpit displays are hard mounted and visible within the camera view, this movement caused the displays to wander within the frame more often than desired.
For this reason, a hard mounted camera with controlled pan was chosen over a fully stabilized gimbal. This approach reduces visual jitter, minimizes pitch induced motion, and keeps the cockpit view consistent.
Kairuhs Immersion and Telemetry
1.14 inch telemetry displays are integrated directly into the dashboard, presenting real time vehicle data as part of the cockpit.
A Kairuhs kit engine temperature probe provides live engine temperature data inside the cockpit, helping monitor engine temp.
The cockpit also features a functional steering wheel driven by a standard servo. As the wheels turn, the steering wheel turns with them, reinforcing the sense of scale realism and providing visual feedback that matches the vehicle’s actual steering input.
Chassis and Steering Upgrades
Upgraded Miuzei 25 kilogram digital metal gear servos
Upgraded Yeah Racing BBG shocks with 50 weight oil on hard springs
Building an RC Car for FPV Rally
If you want FPV rally to feel real, the view comes first. Choose a lens that matches scale depth. Place the camera where a driver would realistically sit. Find a dashboard with real geometry so the view has context.
From there, the car needs to survive the environment. Suspension that absorbs trail impacts. Steering that stays precise at speed. Proper filtration for dusty conditions. A flight controller that provides stable telemetry and a reliable GPS.
Finally, decide how you want to experience information. A clean OSD is extremely effective. A cockpit display shifts the experience toward full immersion. Neither is wrong. The choice depends on how you want the vehicle to feel.
Why FPV Builds Benefit From a Flight Controller
Many RC car builds avoid using a flight controller because it adds complexity. Traditionally, RC cars are simple systems, and adding a flight controller can feel unnecessary or intimidating, especially for builders who are used to running everything directly from a receiver.
That hesitation is understandable. A flight controller introduces setup, configuration, and a learning curve. However, once integrated properly, it unlocks capabilities that fundamentally change what an FPV build can do.
A flight controller turns an RC car into a data driven platform.
With a flight controller, the vehicle gains awareness of its own attitude, orientation, speed, and position. Pitch, roll, yaw, and acceleration data become available in real time. GPS allows for accurate speed measurement, position tracking and logging. Engine and system monitoring can be tied into warnings and alerts.
A common misconception is that flight controllers are only useful for stabilization. In FPV builds, stability is only a small part of the picture. While flight controllers are not used to actively steer the car, they do help maintain consistent heading reference and smooth directional behavior by monitoring yaw and vehicle orientation as the car moves forward over uneven terrain.
Knowing vehicle attitude helps interpret terrain changes. Data logging makes it possible to compare runs, tune setups, and improve driving consistency over time.
Once a flight controller is in place, the build stops being just a fast RC car and starts behaving like a real vehicle system.